A continuous-time filter with a transfer function  is approximated by a digital filter designed using both the direct substitution and matched z-transform methods. Then the digital filters are used as the forward-path transfer functions
is approximated by a digital filter designed using both the direct substitution and matched z-transform methods. Then the digital filters are used as the forward-path transfer functions  in two discrete-time feedback systems both with feedback transfer functions
in two discrete-time feedback systems both with feedback transfer functions  The gain K is gradually increased from 0 upward. Which system will go unstable at a finite value of K? Explain your answer.
The gain K is gradually increased from 0 upward. Which system will go unstable at a finite value of K? Explain your answer.
What will be an ideal response?
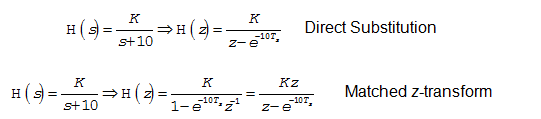
Since the loop transfer function of the direct substitution filter has one finite pole and no finite zeros, the root locus will eventually exit the unit circle and the system will go unstable at that point.
The loop transfer function for the matched z-transform filter has a pole inside the unit circle and a zero at zero and the root locus will simply move from the pole to the zero inside the unit circle without going outside the unit circle. So this system will not go unstable at any finite value of K.
You might also like to view...
The type of plastic pipe that is primarily connected with clamps is _____.
a. ABS b. PE c. PVC d. CPVC
All of the following statements are true EXCEPT:
A. machinists use a pin press to separate pressed-fit pins and pistons from their connecting rods. B. pistons have a notch on the side of the piston head that faces the front of the engine. C. always soak a piston and rod assembly in a chemical cleaner. D. reinstallation is done using a rod heater to heat the eye of the rod.
The ____________________ motor is a three-phase ac motor that operates at a constant speed from no load to full load.
Fill in the blank(s) with the appropriate word(s).
ISO metric and ASME M profile thread series are not interchangeable with Unified thread series because of ____.
A. size variations B. strength variations C. differences in materials D. compatibility issues