Design a PI controller using Bode techniques for the plant:
such that the following performance specifications are met:
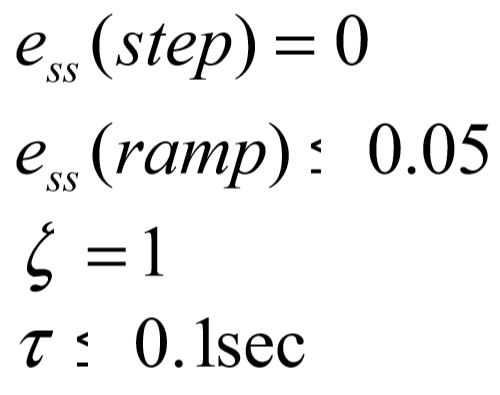
System is stable.
What will be an ideal response?
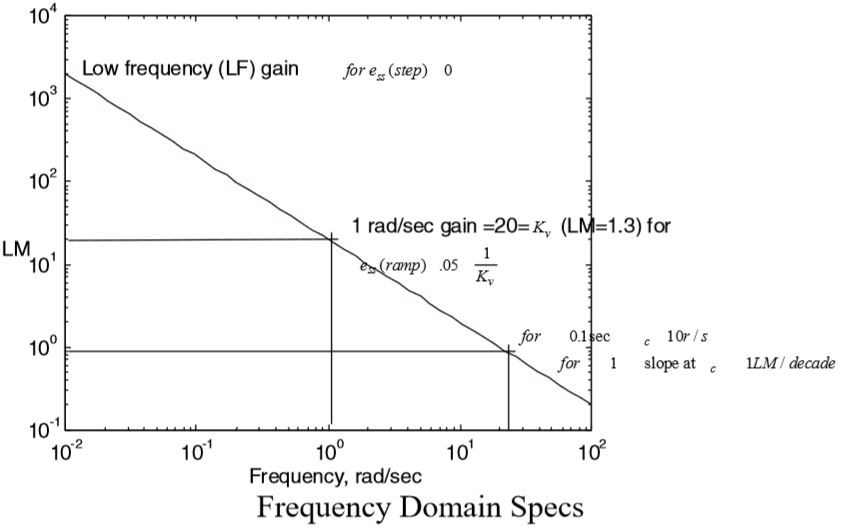
The specs are first mapped into the frequency domain, specifically onto the Bode LogMagnitude (LM) plot.
A plot of the uncompensated system (plant) and the spec system is shown below.
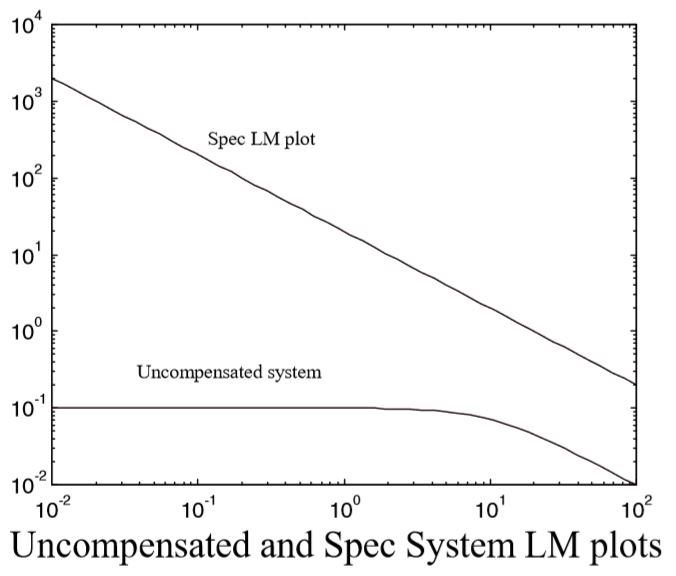
The PI compensator adds a low frequency slope of –1 LM/decade, adds a zero, and adds gain to an uncompensated system. To make the uncompensated system match the spec we must “bend” the low frequency part of the LM plot up to have a slope of –1 at frequencies of 10 r/s and less. This can be accomplished by adding the PI transfer function:
The value for K is 20 (alog(1.3)). This is the amount of gain required to vertically shift the uncompensated system plot until it coincides with the spec plot. The resulting PI compensator transfer function is:
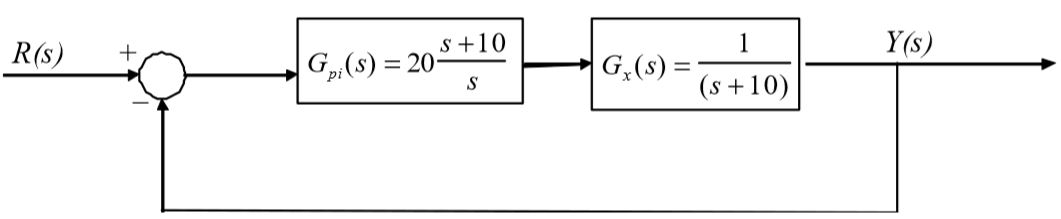
The final control system is shown in the following figure.
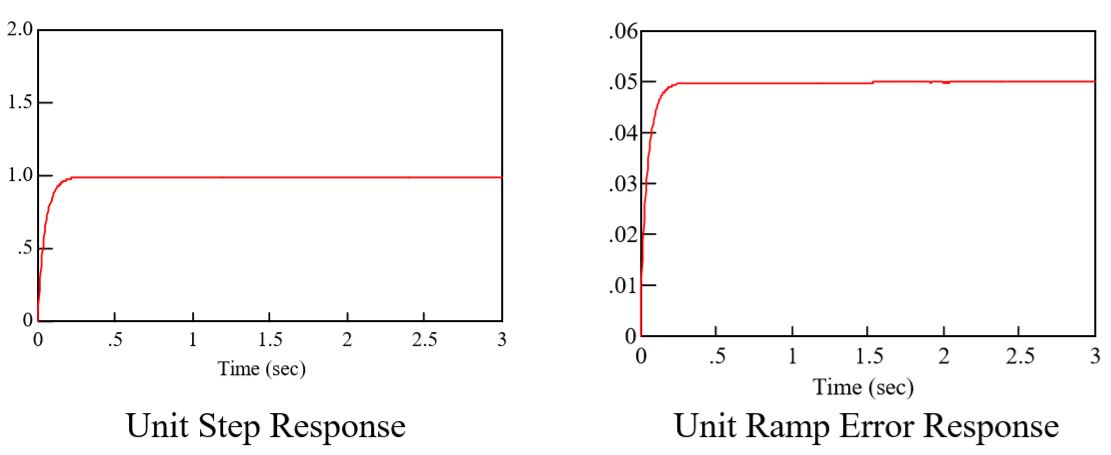
The unit step response and the unit ramp error responses are presented below.
You might also like to view...
How many liters of liquid are in a five-gallon container that is half full?
a. 5.14 b. 8 c. 9.46 d. 18.9
A ________ would include what sets our company apart from the competition.
A) value B) vision C) mission statement D) all of the above
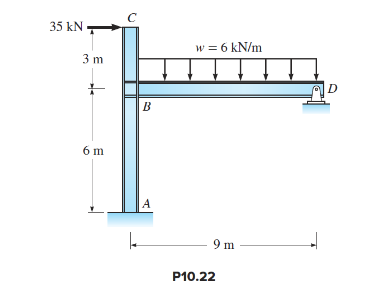
Compute the reactions and draw the shear and moment diagrams for beam BD in Figure P10.22. EI is constant.
Technician A says that most experts recommend replacing all drum brake hardware including the springs every time the brake linings are replaced. Technician B says that the starwheel adjuster must be cleaned and lubricated to assure proper operation. Which technician is correct?
A) Technician A only B) Technician B only C) Both technicians D) Neither technician