This is an example of a sensing operation during the process of work-handling in a robot manipulator. Strain gauges can be used to measure the force acting on the object and are mounted on the fingers of a gripper. Strain gauges 2 & 3 are attached inside of the finger. Strain gauges 1 & 4 are attached to the outside of the finger.
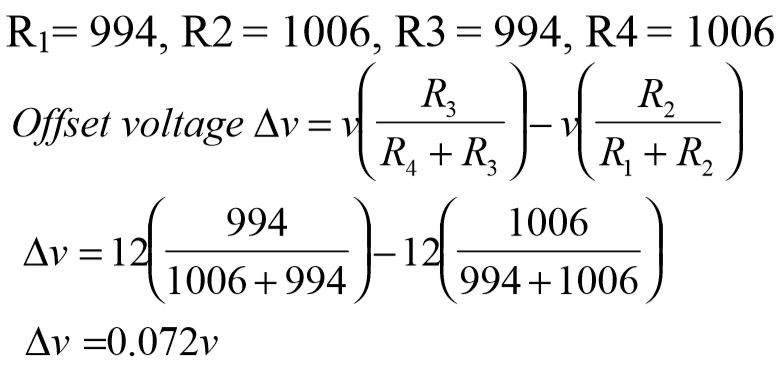
When the object is grasped, gripping force causes strain gauges 2 & 3 to stretch and 1 & 4 to compress. The resistance of the gauges 2 & 3 increase, while the resistance of gauges 1 & 4 decrease. Suppose the strain gauges are used as force-sensors, what is the bridge output when there is no gripping force? What is the output voltage for a gripping force that causes a strain of 3000 µm?
(Let us assume the supply voltage to be 12V. Strain gauges have unstrained resistance of 1000?.Use the formula, 
What will be an ideal response?
Consequently, gauges 2&3 increase and 1&4 decrease by 6 .
You might also like to view...
The failure of an IDPS system to react to an actual attack event is called a(n) ____________________.
Fill in the blank(s) with the appropriate word(s).
On earth floors in stalls, remove _____ to _____ inches of soil each year and replace it with clean soil
a. 3, 6 c. 10, 12 b. 8, 10 d. 12,16
Compute the lateral area of a regular pyramid that has a base perimeter of 98.00 inches and a slant height of 18.0 inches.
Fill in the blank(s) with the appropriate word(s).
Removing an engine is being discussed. Technician A says that it is not necessary to remove the air conditioning compressor or refrigerant from some cars. Technician B says that it is not necessary to disconnect or remove the battery. Who is correct?
A. A only B. B only C. Both A and B D. Neither A nor B